
芝能汽車出品
今年是智慧駕駛技術的快速推進階段,芝能在追蹤行業發展的時候,明顯看到華為和小鵬兩家企業在推動智慧駕駛技術的發展。不僅僅是產品的完善,在全國推行的營運範圍也在逐步擴大。
在小鵬G9的釋出會上,展示了XNGP的當前實力 :在高速路段能實作1000公裏只需一次人工接管,而在城區場景下則可以實作150公裏接管一次。

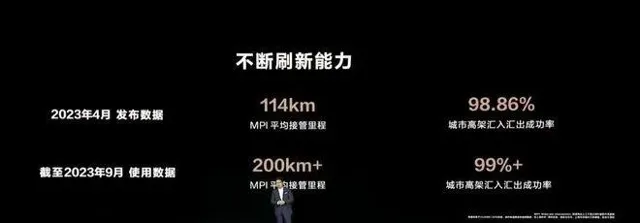
華為的自動駕駛系統在高速路段每1000公裏需接管一次,在城區每200公裏接管一次。無論小鵬和華為,都顯示了透過技術投入以改變汽車購買者的決策的願望。
自動輔助駕駛技術的進步首要還是人才。不論是華為還是小鵬的自動輔助駕駛團隊,都在正確的方向上努力深耕,推動 演算法、算力、數據 三大要素在車載系統中的套用——這被視為自動駕駛技術發展的核心因素。

Part 1
智慧化的下半場
——算力是基礎設施
自動駕駛控制系統算力方面,現在技術路徑已經清楚 :算力的需求分為兩部份,一部份集中在車內,主要負責數據收集和推理;另一部份則位於車外的伺服器,負責處理車輛本地無法處理的任務,以進行自動駕駛訓練,以便更好地解決問題。
在此方面,特斯拉的自動駕駛技術發展是值得學習的方向:
◎ 2016年之前: 依賴於Mobileye的技術。
◎ 2016-2017年: 輝達技術的過渡期。
◎ 2018年至今: 特斯拉實作了FSD軟硬體的全棧自研,包括自主開發的硬體和軟體。
實際套用方面,特斯拉也投入了大量的工作:
◎ 2021年: 引入了自動標註技術,這種技術可以自動為訓練模型標註數據,顯著提高了數據處理效率。
◎ 2021-2022年: 演算法持續升級,顯示了特斯拉不斷改善其自動駕駛系統核心演算法的決心。
◎ 2023年: 特斯拉計劃推出全新的車載芯片和雲端超算平台Dojo。
綜合對比來看,從算力和伺服器兩個方面,國內車企都在緊跟步伐。目前基本達成一致意見:
◎ 高配系統 : 兩顆Orin X,具備512TOPS的算力。
◎ 低配系統 : 一顆Orin X,或者采用Orin N和地平線J5作為替代方案。
實際上,有意義的入門方案是具備100-200TOPS的算力,否則低配和高配之間的效能差異過大。

在雲端算力方面,車企選擇與雲端運算服務商合作推進算力推演,比如2022年8月小鵬汽車宣布與阿裏雲合作投入20億元建設位於烏蘭察布的「扶搖」智算中心並已投入使用。

而像華為這樣的全棧選手,則圍繞華為雲正式釋出烏蘭察布汽車專區,為自動駕駛場景提供安全合規、全棧自主創新、具有澎湃算力的雲基礎設施。同時,華為雲重磅釋出自動駕駛開發平台,將華為和夥伴在汽車行業的多年經驗積累與盤古大模型等新技術進行深度結合,提供更加敏捷高效的自動駕駛全流程開發平台,加速自動駕駛量產。


Part 2
智慧化的下半場
演算法和數據
● 演算法
自動駕駛技術的進步不僅僅依賴於硬體和算力,演算法的開發至關重要,包括傳統的電腦視覺演算法,還包括深度學習和神經網路等復雜技術。
以特斯拉為例,主要演算法包括感知技術(Occupancy Network)、規劃技術互動搜尋(Interaction Search)、地圖構建技術(Lanes Network)、自動標註技術(Autolabeling)和仿真技術(Simulation)。
◎ Occupancy Network 技術能夠精確了解復雜環境中的障礙物,包括不尋常的、異形的,以及未知類別的物體。
◎ 規劃方面 ,使用了互動搜尋模型,可以幫助車輛預測和評估與其他車輛和行人的互動,從而制定最佳駕駛策略。
◎ Lanes Network技術 ,實作了線上構建車道線向量地圖,生成了帶有車道線拓撲結構的稀疏車道線,為軌跡規劃提供了關鍵資訊。還采用自動標註技術,透過高精度軌跡估計和多車多旅程的地圖重建,對新的旅程進行車道線的自動標註,提高了標註效率。利用視覺仿真技術生成各種測試場景,透過AI化的方法,大幅減少了仿真場景的設計和生成時間。這些技術的整合推動了特斯拉自動駕駛系統的發展。
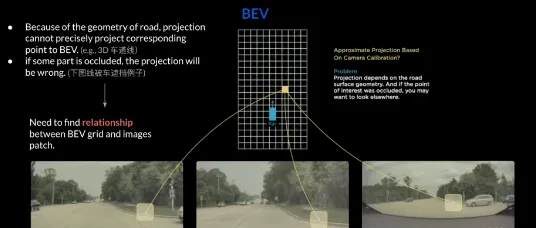
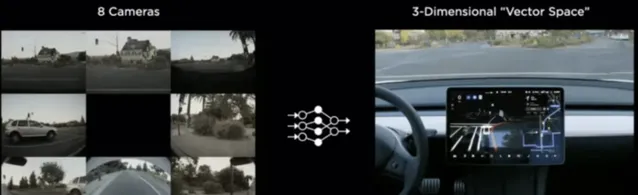
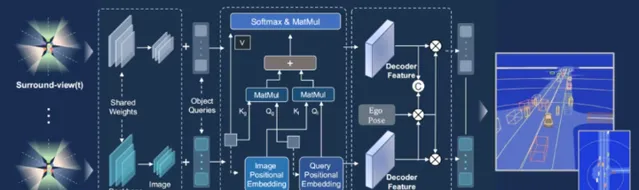
自2023年起,國內開始跟上演算法的叠代,引進以視覺為核心的BEV(Bird's Eye View,俯檢視)感知技術 。該技術依賴於多個視角的影像序列,演算法需將這些不同的透檢視轉換成BEV特征,以實作例如輸出物體的3D檢測框或在俯檢視下的語意分割等功能。在實際套用中,由於眾多團隊曾在L4自動駕駛領域有過嘗試,從基於L4的思路轉向新的視角,往往意味著需要徹底的思考和重新構建。
國內的自動輔助駕駛技術最初大多依賴高精地圖和雷射雷達,目的在於彌補環境檢測的不足,以提供更優質的服務體驗。但隨著2023年的到來,業界共識開始傾向於減輕對高精地圖的依賴(轉向輕量級地圖),同時在降低成本的前提下,探討如何提升雷射雷達的套用價值,特別是在城市的NOA(Navigate on Autopilot,城市輔助領航)場景中如何更有效地利用雷射雷達。
● 數據
數據被譽為自動駕駛的「大腦」之一。在這方面,由於技術門檻相對較低,國內已經形成了一套有效的數據叠代模式。這為自動駕駛團隊提供了豐富的數據資源,支持了學習和決策的需求,包括傳感器數據、地圖數據和即時交通數據等。許多車企每天收集的數據量超過千萬公裏,月數據量更是超過億公裏級別。透過挖掘這些數據中的特殊資訊,不斷最佳化數據的數量和品質,為自動駕駛演算法的訓練和最佳化提供了強大支持。
小結
2023年,中國的車企普遍感受到電動汽車市場的競爭愈發激烈。展望未來3至5年,自動輔助駕駛技術成為各大車企爭相投資的焦點,被視為能夠創造價值的新領域。這也是Apple曾經想要涉足但未能取得顯著成功的智慧駕駛領域。











